産学連携
金沢工業大学(KIT)中沢実研究室 様
2024年度
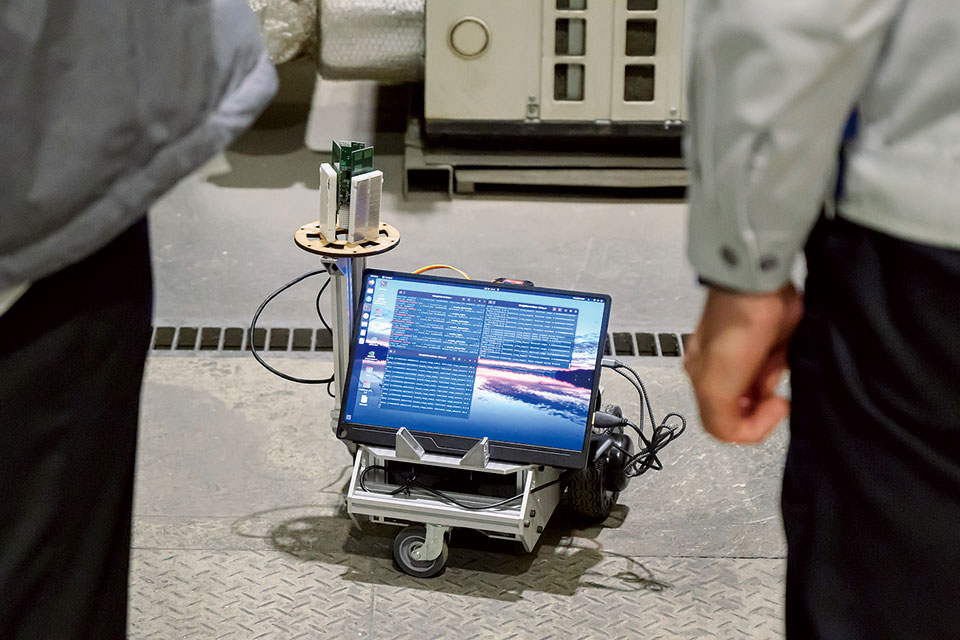
企画開発室では2024(令和6)年度、金沢工業大学(KIT)工学部情報工学科の中沢実研究室との共同研究でUWB、LiDAR、超音波の3センサーを組み合わせて走行する自律ロボットの開発に取り組みました。3センサーはいずれも対象物との距離間から自己位置を判定するのに有効な通信手段。ロボットは各センサーで得た自己位置情報を基に、障害物や段差を認知し、指示内容に応じた最適なルートを選択して走行します。開発の軸となるUWBセンサーは位置情報を高精度で取得できる通信規格です。自動車のスマートキーやスマホと連動した紛失防止システムなどに使用されていますが、中沢研究室によると産業用はまだまだ少数派。2025(令和7)年2月に別川製作所本社工場の塗装エリアで実証実験を行い、UWB通信を活用した産業用ロボットの有用性を確認しました。
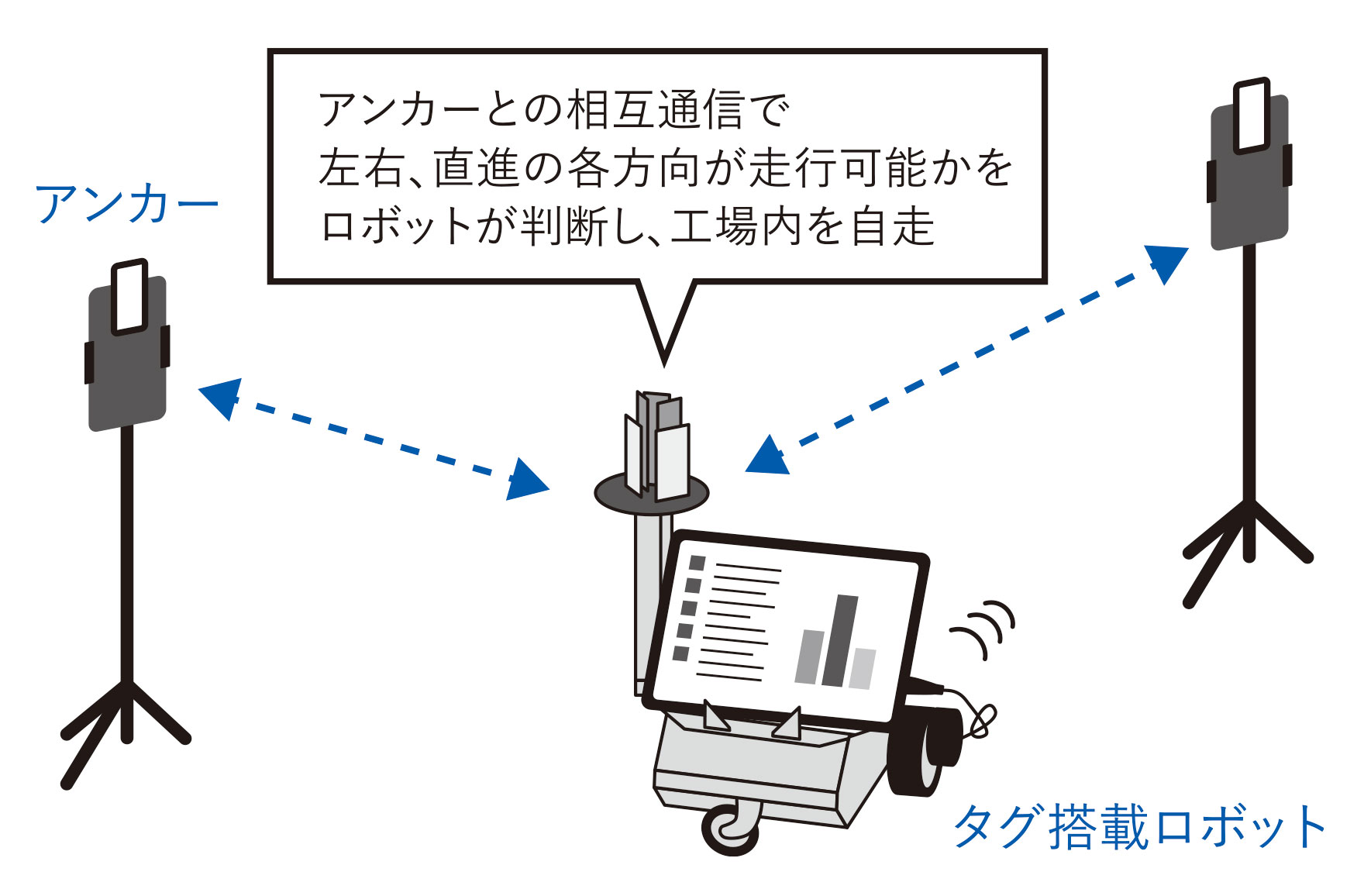
開発に携わったのは、中沢研究室に所属する情報工学科4年の3人。奥瀬皓也さんはロボットが自律走行をする上で必要な自己位置情報の取得にUWB通信を活用することを提案しました。超広域の周波数を用いるUWB通信は、キャッチできる情報の幅が広く、高い精度での空間把握が可能になります。奥瀬さんは自作ロボットの車体にUWBタグを搭載し、対象空間に一定間隔で固定したUWBアンカーとの相互通信で左右、直進の各方向が走行可能かをロボットが判断し、自走する仕組みを作り上げました。
そしてそのロボットが走行したルート情報を基に、対象空間の周辺状況を示す「環境地図」を自動で生成する技術を担当したのが大野颯太さんです。工場内は繁忙期と閑散期、時間帯やその日の作業内容によって資材の物量や人の往来頻度が変わりますが、その度にロボットの走行ルートが制限されれば作業効率は下がり、人間がルートを修正する手間が発生します。今回大野さんは建物の設計図面から大まかに把握して環境地図を生成し、「コストを抑えたルート」「最短時間で指定場所に行くルート」など、目的に準じた経路計画をロボット自身が自動で組み立て、状況に応じて修正もしながら自走するプログラムをまとめました。
また、工場内には設備・機械が設置され、排水溝や段差、傾斜などあり、作業工程に応じた資材搬入など不規則に変化しますが、原田峻希さんはそういった障害物にもロボットが柔軟に対応できるようセンサー技術を組み合わせたセンサーフュージョンによる解決方法を提案しました。ロボットの車体に搭載した中・長距離の障害物検知を得意とするLiDAR、短距離でも確実に障害物を認識する超音波の2センサーとUWBを統合。高い確率で障害物の形状をロボットが認識し、回避して走行することができます。実証実験でもグレーチング(排水溝をとじる金属製の格子状の蓋)の上を、ロボットは軽やかに乗り越えていきました。
今回の自律ロボットは、リアルタイムで工場内の環境状況を把握しつつ、目的や指示に準じてルートを選択し、障害物を回避して自走します。具体的な導入用途は今後検証を進めていきますが、巡視や点検、情報収集をはじめ、幅広い目的やシーンでの活用に期待が高まります。
| 奥瀬さん | 以前、家やオフィスを想定した生活支援ロボットを研究していましたが、今回は工場。機械の稼働状況によって生じる死角問題を解消したり、IoT機器など既存の通信規格とUWB通信の混線を回避したり、多くの課題と発見があり、新鮮な気持ちで取り組みました。 |
|---|---|
| 原田さん | 工場DX化は今ちょうど発展途上の段階で、昔ながらの工場現場にITを組み入れるケースが一般的です。いずれはバリアフリーなDX工場が主流になるかもしれませんが、今回のように「現状」にロボット側を適応させていく開発は、高い汎用性も期待できるのではないかと思い、大きな挑戦だなと感じました。 |
| 大野さん | 興味があって僕が担当した今回の研究内容は、先行事例が少なく、手探りなところもありました。でも、共同研究を機に、地図の自動生成とそれを基にした経路計画という分野に実践的にフォーカスできたことは貴重な経験になりました。 |
| 中沢教授 | 大学の中だけで研究していると、どうしても実践環境が限られてしまいます。ロボットを実際の現場で動かして初めて分かる課題も多く、コスト面や使用環境についてユーザーに最も近い企業さんの意見を聞きながら進められたことは、学生たちにとって意義のある体験となりました。 |
| 原田さん | 障害物を回避する動きはコア技術だと思うので、そこにカメラや加速度センサーなどもプラスすれば工場内での利便性、情報の信頼性も上がります。災害や医療現場にも転用できるかもしれません。 |
|---|---|
| 大野さん | 地図を手軽に生成し、条件に沿った経路を自律走行できるという点が、今回の研究で分かった強みだと感じています。前情報である建物の設計図面の取り込み条件にまだ課題はありますが、無人空間を24時間自律走行できることから、工場はもちろん、夜中のショッピングモールの巡回など、サービス業の働き方改革にも役立てると思います。 |
| 奥瀬さん | 今回はロボット単体の枠組みの中で技術を開発していきましたが、UWBの設定次第ではこの単体ロボットがまた別のロボットを率いて工場内を走行する複合的な技術導入も可能なのかなと思います。工場DX化の大きな戦力になると期待しています。 |
| 中沢教授 | どの研究も面白さと有用性があり、三者三様の技術を組み合わせて一つの形にできたことがよかったですね。研究室としては、今後は精度の上昇や導入に向けた検証にも、チャレンジしていけたらと思います。 |

奥瀬 皓也さん
金沢工業大学
工学部情報工学科4年

原田 峻希さん
金沢工業大学
工学部情報工学科4年

大野 颯太さん
金沢工業大学
工学部情報工学科4年

中沢 実教授
博士(工学)
金沢工業大学
工学部情報工学科
【関連ページ】
URL:https://www.kanazawa-it.ac.jp/kitnews/2025/0304_betsukawa.html


