産学連携
金沢工業大学(KIT)中沢実研究室 様
2024年度

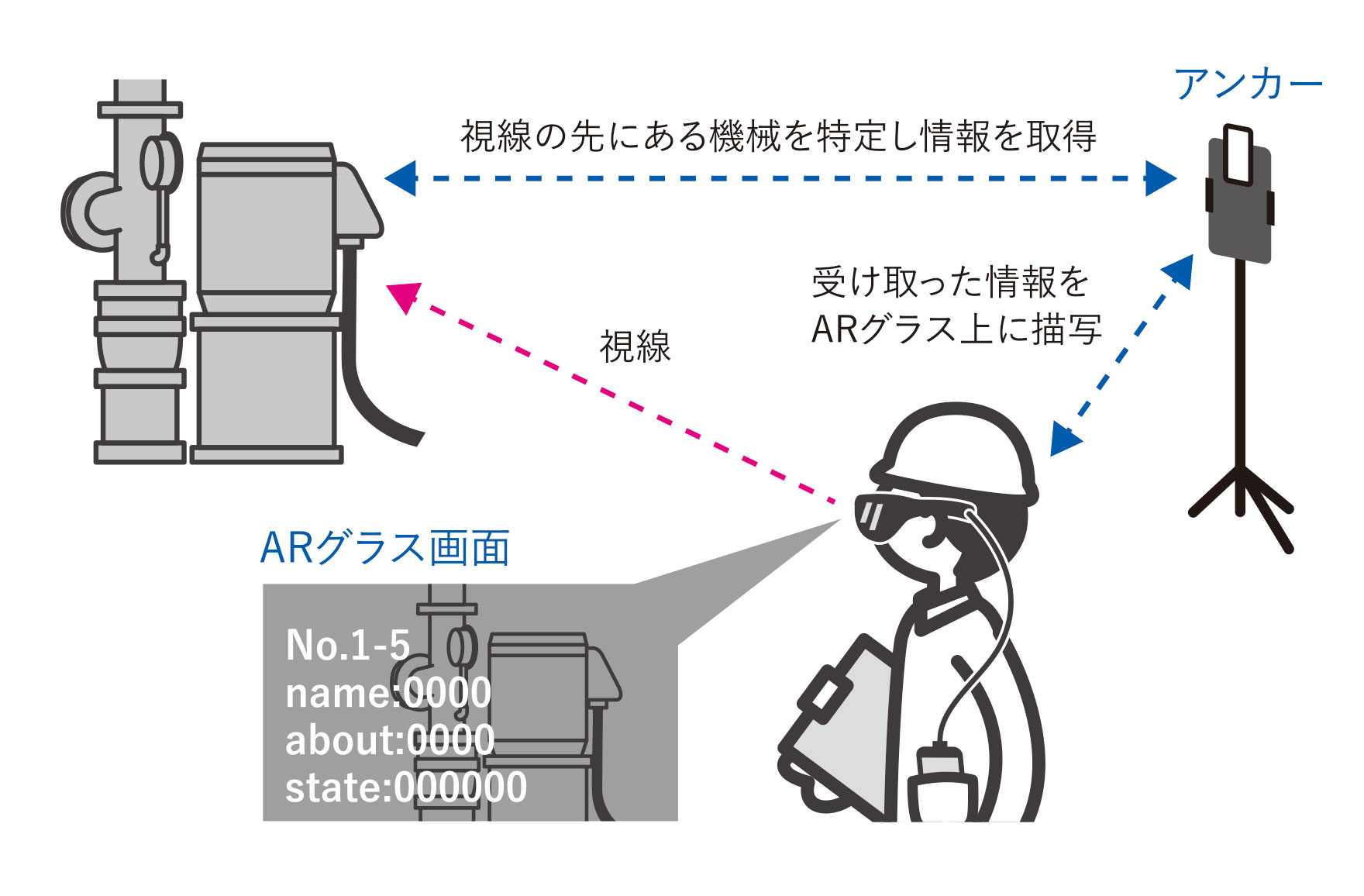
DXを目的に、製造現場でも導入が進む産業用AR(拡張現実)。点検や保守など幅広い業務を支援するツールとして注目を集めています。企画開発室は2024(令和6)年度、金沢工業大学(KIT)工学部情報工学科の中沢実研究室との共同研究で、ARグラスとUWB(超広帯域無線通信規格)を組み合わせ、完全ハンズフリーで素早く情報を取得できる新発想のロケーションARシステムを共同研究しました。
担当したのは市村凌久さん(4年)です。従来の産業用ARはデバイス内のカメラでARマーカー等を撮影し、その画像から対象機械の情報を引き出す「ビジョンベース」の手法が多数派です。しかしその場合、ARマーカーの読み取りに時間や手間がかかり、タブレット端末を使用するケースでは両手がふさがってしまうことが課題でした。今回は、機械の識別を画像に頼るのではなく、UWBによる位置情報とARグラスを装着した時の角度情報から割り出し、必要なデジタル情報を自動的に取得する方法を考案しました。
UWBは高い精度で位置情報を取得するのに有効な通信規格です。スマホにUWBタグを接続し、対象機械の周辺にはUWBアンカーを固定。ARグラスとスマホは連動しており、実際の通信操作はスマホで行います。まず、タグとアンカーの相互通信で得られた自己位置情報をスマホのARアプリに保存していた環境地図と照合し、作業者の現在地を推定。さらに、スマホに組み込まれているIMU装置(加速度センサー)で作業者が見ている視線情報も付随してアプリで解析し、UWBからの情報と組み合わせて作業者の視線の先にある機械を特定します。これにより、作業者は調べたい機械の方向に視線を向けるだけでその機械の現実画像と関連のデジタルデータとが重なって表示された画像を確認できます。立ち止まることなくスピーディーに複数の機械を見て回ったり、両手が空いているのでそのまま修理や点検作業することも可能です。
ARで取得できるデジタル情報は、機械の設計図や稼働時間、負荷状況など、ARアプリを経由して企業独自のクラウドやwebサーバーにリクエストし、リアルタイムに自由に引き出せる設定を想定しています。2025(令和7)年2月に別川製作所本社工場の塗装エリアで実証実験を行い、グラスを装着した社員からは視線を移すだけで情報が切り替わるスピード感や実際の機械とデジタル情報が重なり合って見える画面表示の構成が好評で、実用化への期待感が高まりました。
| 市村さん | 工場での実証実験です。大学では天井の高さや障害物など現場工場を想定しながらUWB通信の試験をしていましたが、実際に別川製作所さんの工場で測ってみると、距離の数値で予想外に誤差がでたり…。もっと精度を上げないと!と気を引き締めました。また、実際に塗装担当の方に喜んでいただけたのもうれしかったです。 |
|---|---|
| 中沢教授 | 企画開発室さんは過去にKITとの共同研究でスマートグラスを使って遠隔地と実際の現場の映像をグラス画面で共有し、同時進行で作業を進めて効率化を図る研究も行っていました。今回はUWB通信を使った位置情報を基に、目の前の機械の「目には見えない奥の情報」をグラスに表示させる手法です。位置情報と角度情報をミックスさせて自動的に情報を出すのはかなり画期的なアイデアですが、一定の有用性を示すことができてよかったです。 |
| 市村さん | ARマーカー読み込みの手間がない代わりに、現状は特定の「初期位置」を設定し、その位置から視線を移動させた角度を計算して対象機械を特定する手順です。でも起動にある程度の時間を要するのが課題で…。グラス上での情報の映し方も、もっとユーザビリティーを考慮した画面構成を検討できるはずで、伸びしろがたくさんある技術だと思います。 |
|---|---|
| 中沢教授 | 現場にいながらグラスを介して機械の内部の状態が見えるのは、安全配慮の面でも大きな意義があります。原因不明のトラブルを前に不用意に機械に触れると事故やケガにつながりかねません。そんな時に機械に触れることなく、内部の詳細な情報をグラス表示で得られれば安全性を確認した上で確実な修理方法を導き出せるかもしれません。企画開発室さんからは自律ロボットと組み合わせた実装の可能性についても提案をいただいており、有用性はまだまだありそうだと感じています。 |

市村 凌久さん
金沢工業大学
工学部情報工学科4年

中沢 実教授
博士(工学)
金沢工業大学
工学部情報工学科
【関連ページ】
URL:https://www.kanazawa-it.ac.jp/kitnews/2025/0304_betsukawa.html


